Just as any company engaging in an engineering project to build a robotic arm, Rozum once also was on the assignment to get a heavy-duty, but small robot motor. We researched the market and designs offered by prospective competitors, investigated into specifications of various actuator types, finally setting minds on servomechanisms. Read on to learn why.
Small robot motors: the challenges
Due to reduced size, small motors typically have limited load capacity, which is why the miniature drives are preferred in systems where compactness is more critical than power. However, robotics is an application where small dimensions and substantial torque output are equally important. Most engineers would also mention great dynamics, responsiveness, and operational efficiency as primary standards for a robotic motion solution.
To maximize torque density and efficiency without increasing the mass or the footprint, the usual practice is to utilize high-end bearings and rare-earth magnets or to add gear reduction. The above measures get the price soaring, while entailing certain nuances affecting performance of robotic systems. For instance, gearing backlash may have an adverse effect on precision and repeatability rates.
So, is it possible to get the “small,” “powerful,” and “cost-efficient” in the same motor?
Smaller options with bigger benefits
Taken the immense variety of available actuators, choosing a motor to drive a robot is always a tough decision to take. Hydraulic, pneumatic, or electric—depends on the type of energy supplied to get the machine moving. By and large, the most frequently selected options correspond to the three electromotors:
- a brushed or brushless direct-current (DC) engine
- a stepper
- a servomechanism

Brushed DC actuator
The basic elements in a brushed motor are a stator with permanent magnets and brushes and a rotor incorporating an output shaft, conductive coils, and a commutator. The operation concept is as follows:
- Seated in a fixed position around the rotor circumference, the stator produces permanent magnetic field.
- The rotor also generates electromagnetic field, but only when supplied with current. The attractive interaction of the two fields sets the rotor revolving. The sequence of energizing separate coils is synchronized with how the stator poles move.
- The commutators—typically made of copper—come into contact with the carbon brushes located on the stator. The mechanical commutation reverses the current flow through the coils, thus enabling on-going rotation to generate torque.
Obvious advantages of the motor type are simplicity of control logic, low cost, and general availability. In applications with high torque demand, such as robotic arms, using the engine is backing the wrong horse: brush friction tends to increase with speed, whereas moment of force drops. There are also potential sparking risks, downgrading safety.
Brushless DC drive
In a brushless mechanism, constituent parts are essentially the same as in a brushed actuator, except that the commutator assembly is lacking. Location of magnets and coils is reversed: the permanent type is on the rotor, whereas electromagnets are on the stator. Managing the energization sequence is not via the brush-commutator contact, but via control electronics interacting with the stator coils.
Though more efficient, less noisy, and smaller in size than brushed counterparts, brushless motors are more expensive. On the one hand, absence of mechanical commutation eliminates mechanical wear and warranties spark-free operation. On the downside, it dictates the need to use a sensor to watch magnet positions, which complicates current switching.
The engine is small enough to be a robotic arm actuator, but comes short of precision feedback on motion parameters and a controller to allow for dynamic governance. Adding a gear to a DC motor is a viable method to magnify torque, boosting the capacity of a robot to handle loads.
Stepper
Stepping drives are operated by means of electric pulses commanding the devices to move a specific number of steps—that’s where the name stems from. The order of the signals determines the course of incremental moves. Impulse frequency affects the revolution rates, whereas total pulse count corresponds to the overall distance the mechanism has to travel.
Moving incrementally, steppers enable accurate positioning—even without using an encoder or any other sensor, which simplifies both integration and operation. Together with remarkable torque and small size, the feature makes the motors an ideal alternative to use in a robotic arm or any other similar application requiring precision governance.
The devices can run in a number of modes—full or half step or microstepping. Full stepping enables delivering the largest amount of rotational force and improved speed performance. Smaller angular resolution in the half stepping mode results in smoother operation. Microstepping reduces vibration, noise, and jerkiness.
With regard to disadvantages, steppers consume substantial power, which affects their overall efficiency. The mechanisms have a low torque-to-inertia ratio and become unstable towards the upper limit of the admissible velocity span.
Precision of the mechanisms is somewhat impaired because there is no feedback to signal missed steps. For the reasons, the motor with open-loop control is not always the best alternative to construct a robot, especially if the machine has complex design or requires fast acceleration.
Using servos in a robot: pros and cons
Similarly to a stepper, a servomechanism runs on command pulses telling it where to move. Depending on design, the engine can either shift linearly or turn to specific angles. In contrast to conventional motors, rotation is continuous, which is importation if you want to set a robot on wheels.
Positioning accuracy is outstanding due to closed-loop regulation based on feedback from an encoder or a similar transducer—a key advantage in a robotic project. The motor features small footprint, but delivers substantial torque quantities. The kind of size-to-force ratio is achieved through an integrated arrangement of gears.
Servomechanisms are claimed to provide fast and dynamic response, handling perfectly frequent starts and stops. As opposed to stepping engines, the devices demonstrate no performance downgrading at increased velocities. Moreover, servo motors are capable of maintaining movement precision throughout multiple operations, which is undoubtedly an asset to a robotic arm in an industrial application.
The biggest drawback is costliness. In fact, Asian vendors sell cheaper models, but quality is mostly substandard. When it is a motor from a reputable European or American manufacturer, the price starts at a thousand USD reaching a hundred thousand dollars for a fully customized solution. Another drawback—lead times for custom orders are extended, too.
Servo motors from Rozum Robotics
Taken the price and time arguments, Rozum Robotics decided to design and build a motor of its own, tailored to its PULSE robotic arm. Delivered RDrive actuators are geared AC brushless motors with an embedded controller, two magnetic encoders, and two bearings under the hood.
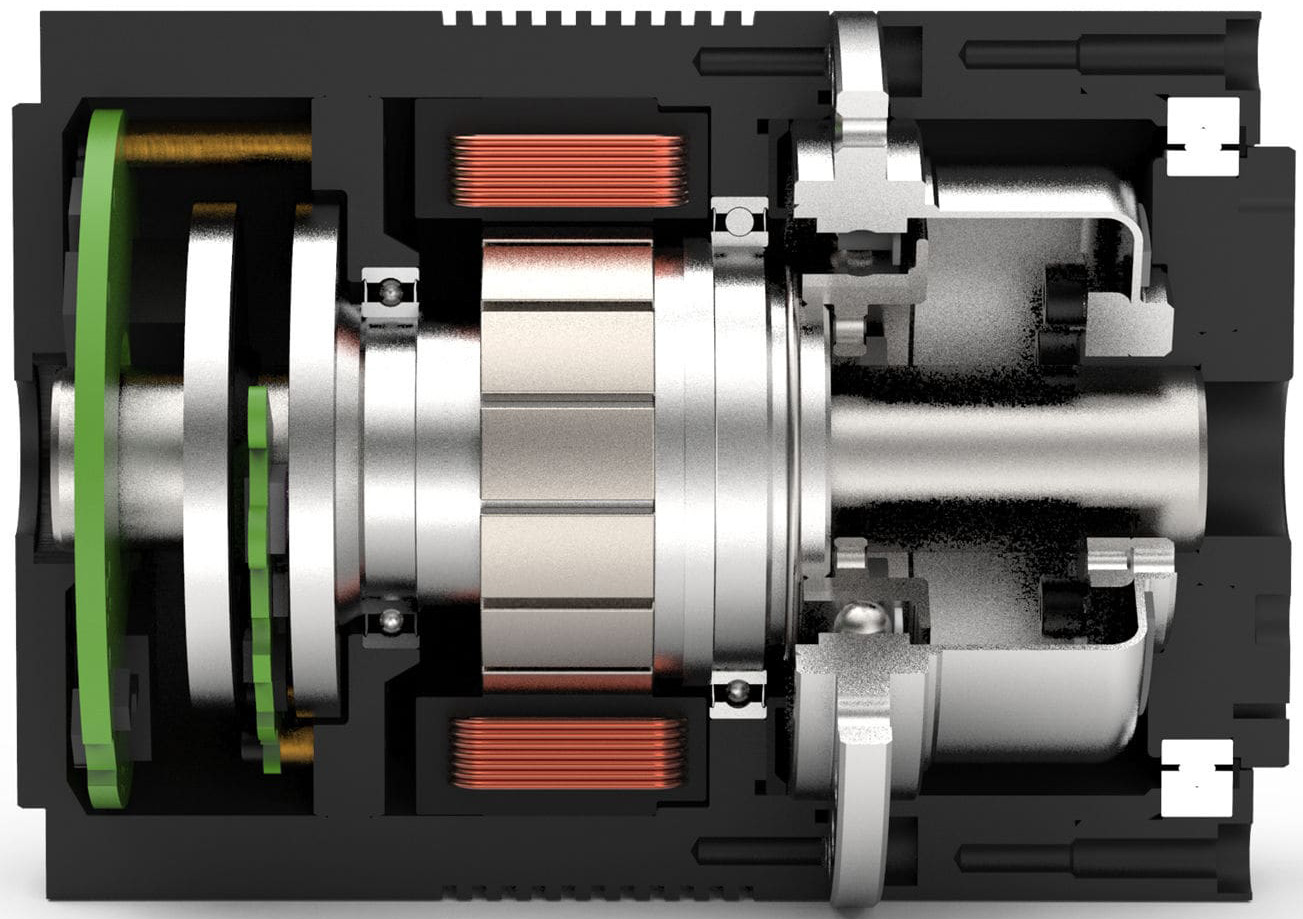
Apart from small dimensions and outstanding moment of force, the mechanisms boast a number of features desirable in a robotic project:
- Integration with minimum effort: Hollow shaft design of the servo housing offers a means to implement various mounting arrangements, while running cabling and other utilities through the hole at the centre.
- Inch-perfect positioning and repeatability: Feedback from two magnetic absolute encoders, coupled with an embedded controller, enables quick response to commands and prompt adjustment of abnormal parameters.
- Flexibility and connectivity: It is possible to set up multiple servomechanisms to work on a single CAN bus, communicating with each other and a network master. Setup options are ample, empowering the user to build robots of versatile configurations.
- Zero impact of gearing on precision: A strain-wave gearhead packed into the servo housing allows to substantially increase moment of force with no move becoming an inch less accurate.
There is nothing to stop you from retrying the experiment and engineering a servo on your own, but be prepared to invest into the project time, efforts, and money in large amounts. Or else, you can simply purchase an RDrive motor from Rozum Robotics at a compelling cost. Our specialists will fix you up with a standard model or customize it to your demands.