Perhaps, as a child, you spent time making noise with your remote control automobiles or other playthings. If you were curious enough to break an RC toy or clumsy enough to crash it into pieces, you saw mini motors inside—servos. These are the devices that propel the miniature vehicles and toys.
Hobbyist drives are a very primitive replica of high-end industrial and commercial servos that are used in lab cobots and machines capable of performing versatile manipulations with granular precision.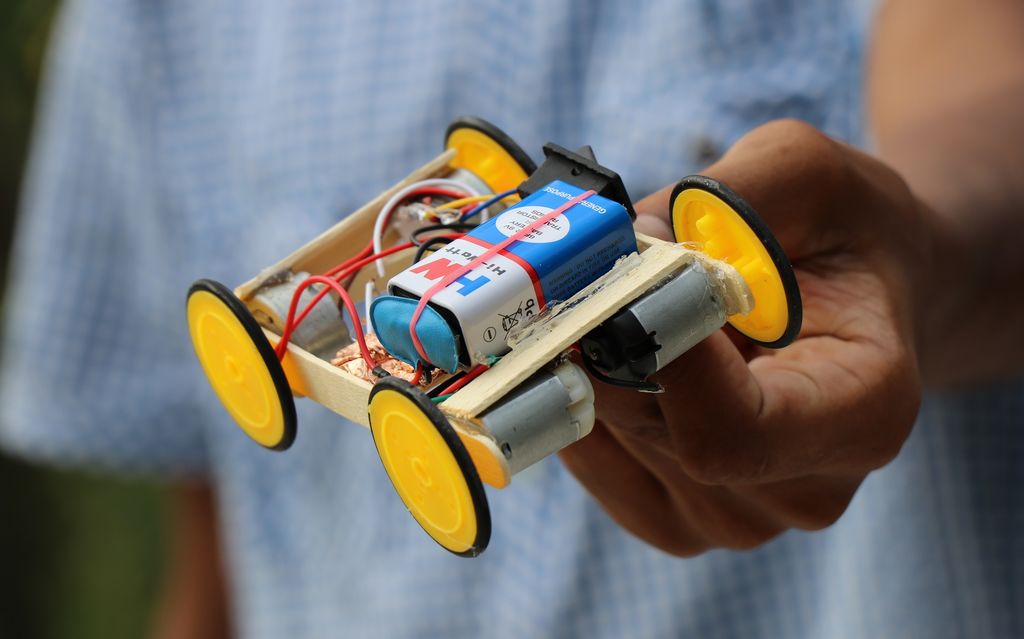
Flashback to the first days of electric motors
Since electroengines have many diverse components connected in a particular way, emergence of the devices became possible only due to a number of breakthroughs in physics. In 1799, Alessandro Volta invented the electrochemical cell that allowed generation of direct current. Later, in 1820, electromagnetic interaction was discovered by H. C. Ørsted that opened the way for more fruitful development. As a result, the first DC motor with turning machinery was presented by W. Sturgeon in 1832.
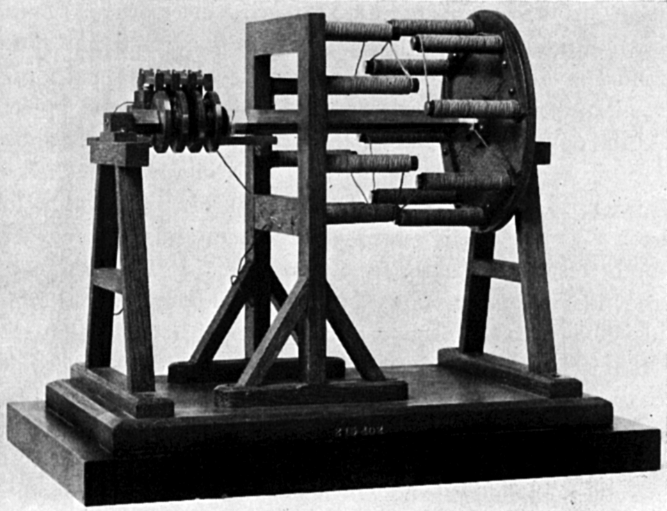
In May 1834, after experiments with electromagnets, Moritz Hermann Jacobi constructed the first rotating electric motor. Four years after, on the Neva river, the physicist presented an electrically driven boat that carried a dozen volunteer passengers at the speed of about 3 km/h. The zinc battery installed onboard the vessel weighed approximately 200 kg.
Though the above inventions were breakthroughs in the engineering of the past, early electric motors couldn’t compete with steam engines in terms of performance and power. In the 19th century, research continued and more contributors were engaged in the development (Ampere, Faraday, Barlow, Botto, Dal Negro).
The motors were further developed and optimized, facing new technological challenges to be finally reduced to the size of a palm. Due to portability and accurate position feedback, mini servo motors became popular among robotics enthusiasts and then spread to other engineering and production domains.
Basic working principles of mini servo motors
A small servo is a motor that converts electrical signals into mechanical motion. It is a rotary or a linear actuator capable of turning to a predetermined position, exactly as commanded.
Servos can also stably hold and re-establish position. If an external force causes a servo to shift from a settled angle, the controller drives the servo to overcome the load. Apart from providing a disturbance rejection, controllers also track input.
Inside miniature servo actuator
Hobbyist servo motors include:
- Control circuit
- Potentiometer
- Output shaft
- Main output gear
- Speed reduction gears
- Main motor
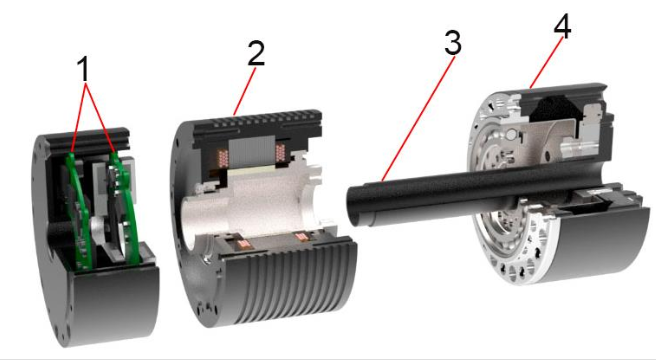
Small industrial servo motors comprise:
Feedback
A distinctive feature of a mini or other servo motor is position feedback, which other motors, such as steppers, lack. In standard hobbyist servos, the response is normally provided by a potentiometer.
The potentiometer is connected to an output shaft with horns and acts as a resistor. The sensor also contacts a circuit board controller and informs it about shaft displacements. In some industrial applications, optical sensors are used instead of a potentiometer.
The circuit board controller receives control signals indicating where the output shaft should turn. Then, current is supplied to the motor so that the shaft could move in a specified direction and hold the resulting position. If a horn is displaced from the predetermined point, the control circuit returns it to where the horn should be.
Types of mini servo motors
A servo as such is not considered a specific motor class. In comparison to other actuators, it is a closed-loop control system that has precise position control. There are many models and configurations of mini servos that are suitable for various industries.
Rotary / linear actuator
Servo actuators can produce linear or rotary motion. A linear drive ensures translational displacement in a straight line. Therefore, it is widely used for elevating, lifting, or pulling items. Typical applications include automatic doors or cutting machines.
For rotational motion, a rotary motor is used. The type of movement is more frequent than linear, both in industry and in hobbyist modeling. It's impossible to imagine robotics without this type of actuators. You can find them in the joints of robotic solutions, such as PULSE cobot, for instance. Without rotary servos, precise control and smooth human-like motion of robots would be hardly possible.
Analog / Digital signal
Servo motors control the output shaft based on the electric signal they receive. The signal can either be analog or digital.
Digital mini servo motors are used for maximum precision when rapid feedback is required, for instance, in helicopter manufacturing and robot engineering. Large amount of hobbyist applications use analog technology, which is much cheaper.
AC / DC current type
Mini servo motors run on either AC (alternating) or DC (direct) current. AC and DC motors vary by their ability to control speed.
An AC set is used when high repeatability and ultra precision are required—in robotics and machinery. The DC current type is used for modelling and hobby electronics. DC servos can also be found in printers, plotters, and other CNC machines.
Brushed / Brushless motors
Brushless mini servo motors are more reliable, efficient, produce less noise. Unlike in brushed motors, rotation is implemented by means of electrical commutation. Brushless are indispensable in settings that require high accuracy and have great torque-to-weight ratio.
To learn basic principles of robotics and make a hobby model at home, micro brushed motors are normally used since they are less expensive.
Key servo parameters
Servo parameters can vary significantly, depending on a wide range of motion-specific settings. Crucial parameters are speed and its control. The properties can be inferior or superior, subject to whether the servomechanism signal is analog or digital.
Industrial systems often demand increased velocity—i.e., the output shaft moving faster. Small servos with continuous rotation, such as applied in robotics and helicopter manufacturing, have digital control enabling rapid operation. For a DC mini servo motor used in modeling, average speed is 0.3 sec /60°.
Besides speed, torque is another important parameter when it comes to industrial and commercial applications since it determines the mechanical capacity of a machine. The standard torque value that mini modelling servos support is about 5 kg/cm. For small servos used in industry, it can be 11 Newton-meter which is about 112 kg/cm.
Bottom line
Technologies are advancing relentlessly. Over a couple of decades, we have witnessed how digital appliances have been getting exponentially smaller and smarter. Developers and researchers are working hard on making robots more sophisticated and human-like. So, mini servo motors remain an essential component of a successful robotic application.