Servobox: RR Servo Starter Kit
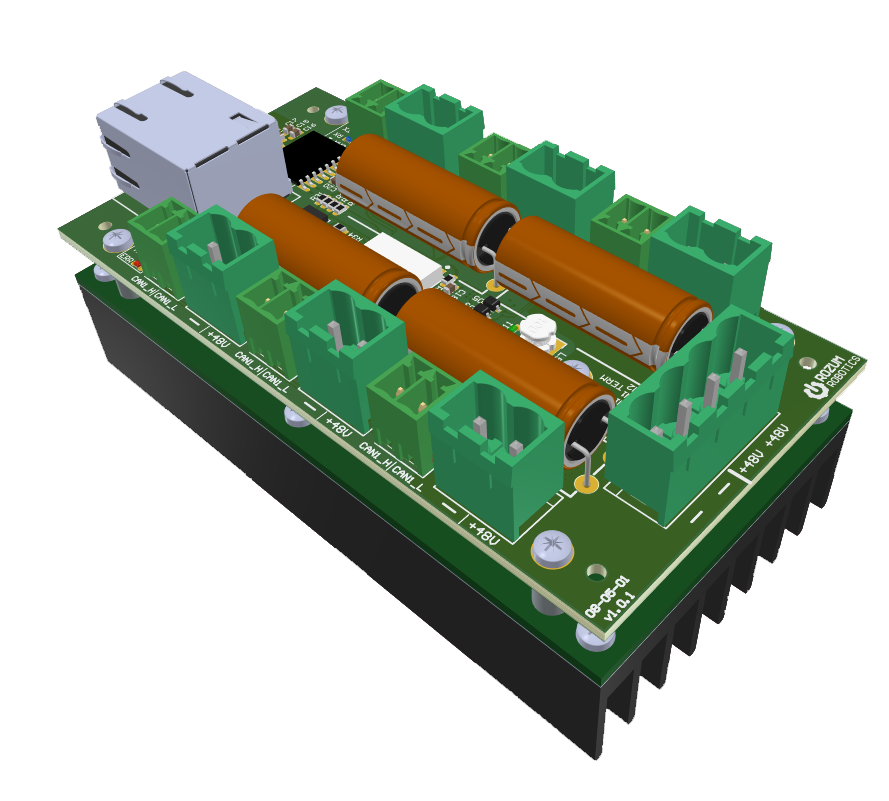
RR-SSK solution allows for the easy and quick integration of RDrive servos into your application, safe and correct operation of RDrive servos in the designed range of loads. The servobox RR-SSK includes:
- USB port
- Ethernet port
- 2x CAN bus
- Energy eater (up to 40W average power and up to 500W peak power)
- External power supply connector 48V (up to 20А)
- Compact design
- USB DFU mode (firmware update over USB)
- Firmware upgrading via Ethernet
- Widows/Linux/MacOS compatibility
- DIP switches for control of CAN terminators, DFU mode, and IP address
- It’s possible to work through Ethernet and USB at the same time
USB port
- Standard CDC mode and VCP mode
- Implementing an interface compatible with RR ServoAPI (CAN1 or CAN1 + CAN2 modes only)
- Power supply from the port (cannot supply motors, only adapter)
Ethernet port
- 100MBit Full duplex
- UDP/IP
- UDP port for the console (configuration and control) - you can also use the NetCat utility to connect
- 2 UDP ports (for each CAN bus) that implement the protocol compatible with RR ServoAPI
- 2 UDP ports for raw CAN data
- Static IP address
- Default IP selectable over DIP switch
- Software update from TFTP (the device in the boot loader mode acts as a TFTP server)
- Ability to scan the network for devices
CAN
- 10kbps - 1Mbps
- Built-in disconnectable terminators for each CAN bus (DIP switches)
- Stabilization of the midpoint for the better EMC
- Merging two buses into one (DIP switch)
DIP switch
1 – Activates the default IP address (192.168.0.123)
2 – Selects DFU mode (firmware update over USB)
3+4 – Electrically connect both CAN buses
5+6 – Turn on the terminator on the bus CAN1
7+8 – Turn on the terminator on the bus CAN2
Note: turning off terminators makes sense only if SSK is supposed to be used in a bus with pre-installed terminators. In the Quick Starter Kit, terminators must be already included.
Advertise protocol
The device sends every 2 seconds a UDP broadcast message to port 49001 with a text description and the IP address at which it is available.
In Linux / MacOS / Windows (Cygwin) systems, the information on the device is available by the command:
nc -ulk 49001
"EU2C"@192.168.0.59
"USB<->ETH<->CAN (CI-NEW)"@192.168.0.56
"USB<->ETH<->CAN"@192.168.0.57
"EU2C"@192.168.0.59
Console
UDP port: 2000
Linux/MacOS/Windows(Cygwin) connection:
nc -u 192.168.0.123 2000
or using Readline library functions (line editing features, access to the command history list, etc.)
rlwrap nc -u 192.168.0.123 2000
Note: UDP doesn't establish a connection (unlike TCP), so you may need to press “ENTER” several times.
Prompt for input
0# - the color of ‘#’ differs depending on the mode:
red – boot loader mode
green – normal operation mode
To obtain the list of available commands, type help.
Description of console commands
Raw protocol description
The raw protocol is used to send and receive arbitrary CAN messages. The SSK provides UDP port 22000 for CAN1 and port 22100 for CAN2. The data format for sending and receiving has the same format:
- CAN_ID: 32 bits (Little endian)
- Data length code (DLC): 8bits
- DATA: 8 entries of 8 bits
The total packet length is 13 bytes. It doesn’t depend on the DLC code.
If DLC value is less than 8, then extra bytes are not taken into account. The messages are sent and received in one packet in one UDP datagram. Extended CAN ID (29 bits) format is indicated with setting the 31st bit into CAN_ID.
The remoted request is not supported.
Ethernet and ServoAPI
To work with ServoAPI via Ethernet, it is necessary to specify the IP address of the device instead of the serial port name.
SSK uses UDP ports 17700 and 17800 for CAN1 and CAN2 respectively.
When working through an Ethernet, in ServoAPI the 17700 port is used by default.
If you want to use a different port, use as the device name a line consisting of IP address and port number separated by a colon:
192.168.0.123:17800
Indication
SSK contains 9 LEDs to indicate various operating modes.
Power indicator (5), two groups of 3 LEDs each (8, 9) to indicate CAN bus operation modes, two LEDs (connection and activity) on an Ethernet socket.
CAN LEDs have two operating modes:
SSK is in bootloader mode and is not ready for normal operation - LEDs light up
SSK is in normal operation – LEDs indicate reception (RX), transmission (TX) or error (ERR)
Energy eater
| Parameter |
Unit |
Value |
| Operation thresholds |
V |
49.8 ±0.2 |
| Retention thresholds |
V |
49.5 ± 0.2 |
| Peak power |
W |
500 |
| Average dissipated power |
W |
20 (up to 40 with forced cooling) |
Location of connectors/control units

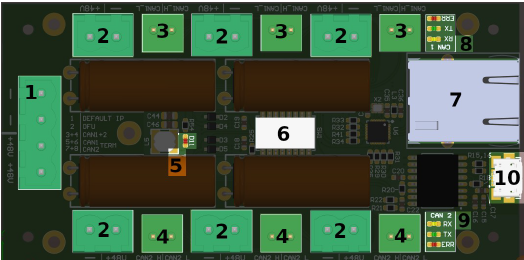
1 - 48V power input for servomotors
2 - 48V outputs for servomotors (all connected in parallel)
3 - CAN1 bus connectors (all connected in parallel)
4 - CAN2 bus connectors (all connected in parallel)
5 - Power indicator
6 – DIP switch
7 - Ethernet socket
8,9 - Status indicators CAN1 and CAN2
10 - MicroUSB Connector
Dimensions
All dimensions are in millimeters.

The details of the previous servo box model are available here.