Not all types of actuators are equally suitable to become a robot component. Alternating current engines are too big, DC motion solutions are too fast and low-torque. On the other hand, steppers and servo motors seem to have the qualities essential to build a robot—consistently high mechanical work output, precision positioning, and compact size.
The engines are similar in that they both ensure flexible regulation of speed, position, and force output. However, differences in their capabilities, control logic, and prices are significant. Below are the key ones, from the perspective of robot applications.
Servos
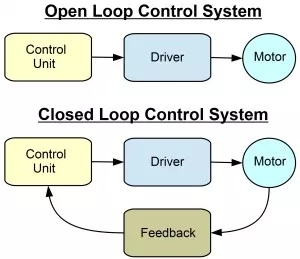
- Motion accuracy: Closed-loop mechanism, with an encoder or another device giving accurate feedback on the actual motor path.
- Torque and speed: Consistent torque output over a wide speed range; copes well with short-term power bursts (e.g., due to rapid acceleration).
- Integration and operation issues: Costly; simple integration, but extra time needed to set the drives properly
Steppers
- Motion accuracy: No feedback; control is through movement in incremental steps.
- Torque and speed: At low RPM, performs better, while, closer to the maximum limit, torque is degrading; can provide holding torque in the power-off state.
- Integration and operation issues: Low price of hardware; easy to setup and maintain.
Though winning the price-and-simplicity competition, steppers lack versatile and accurate feedback. With regard to a complex robot system, it is a minus: knowing the state of different components is essential to get the best out of its performance.
Because stepping motors can miss steps at high acceleration or torque rates, servomechanisms are more credible when it comes to positioning accuracy. Given the above and added the ability to maintain uniform moment of force output throughout a work cycle, servo actuators appear to be a better choice to design a robot.
How to make a choice
Basically, your task is to find the right servo to match your budget and application. Apart from costs, pay attention to the following:
- Motion type—whether an actuator has a circular or a linear motion path, rotates continuously or within a limited range. You need a continuous rotation servo motor for a robot to get around on wheels. When your task is to make a machine do pull or push movements, your choice is the linear type.
- Precision—how accurate a mechanism translates input signals into output shaft positions. Accuracy depends much on the feedback device. Servos can incorporate a potentiometer, an encoder, a resolver, or a Hall sensor. Absolute and incremental encoders are believed to provide the highest precision.
- Speed—how fast a motion solution accomplishes a single positioning task. Pay attention to the design of the motion core. Key factors are the motor dimensions, winding size and resistance, as well as the size and type of magnets.
- Strength—how much rotational or linear force it generates. A handy tool in selecting an appropriate robot actuator is a speed-torque curve illustrating how amounts of produced force change over time. The continuous duty zone in the curve represents those speed-torque combinations where performance is optimal.
- Break strength—what is the limit load that a servo can handle. Refer to the permissible load inertia value. At loads exceeding the limit, various issues are probable, such as unstable control, vibration, etc.
- Size and weight—how well an actuator fits into a robot configuration. The dimensional range of currently available solutions includes: nano, micro, pico, as well as standard, large, and so-called “giant scale” models.
- Bearing type—servos have have either bushings or one or more ball bearings on the output shaft. Bearings affect precision and smoothness of operation. Ball-bearing mechanisms are less wear-prone and can maintain the same accuracy level throughout their service life.
- Gearbox specifications—the gear ratio, the backlash, and material of the gearing mechanism. The gear ratio is the proportional difference between the speed and rotational force at the gearhead input and that at its output. Backlash is amount of free play between mating gear teeth. Since the value influences positioning accuracy, it should be as close to zero as possible.
Gears are typically made from plastic, karbonite, or metal. Plastic ones are lightweight, but unsuitable for heavy-duty applications. Karbonite is the most long-lasting option, but expensive. Metal gears are the heaviest, but they can handle considerable loads.

Consider each application on a case-by-case basis. Typically, a metal-geared servo motor with high torque ratings would be inappropriate to use in a hobby robot—too bulky and high-priced. An industrial-grade motion solution should be big enough to handle significant loads and include one or more bearings that are resistant to wear.
RDrive—the proper servo motor for a robot
To sum up, the right choice to build a robot is not a stepper, but rather a metal-geared servo, preferably with a bearing. It should have a closed-loop motion control system consisting of a controller and an encoder.
RDrive series by Rozum Robotics features servo motors tailored to fit into a robot. Each model incorporates frameless AC actuators of in-house design that enable unlimited rotation in both the clockwise and anticlockwise directions. Coupled with metal strain-wave gearheads with near-zero backlash, they provide invariably high torque over the admissible velocity span. Two bearings—a cross roller and a ball one—support the output shaft and the motor.
A hollow shaft and convenient mechanical interfaces ensure simple integration irrespective of robot design. It takes just a few simple steps to set up a drive for further operation. Moreover, you can connect multiple RDrive units in a daisy chain to design a custom robot configuration. A special API library is available to enable controlling all actuators integrated into your application from a single device.
Two printed circuit boards (PCB), built into the housing, form the motor control circuit. One of the PCBs functions as a controller and the other contains two absolute magnetic encoders.
With 19-bit resolution, the encoders let you be aware of motor positions at every given moment, enabling accurate angular positioning with excellent repeatability. Temperature sensors, integrated into the rotor winding, protect from overheating.